Electric two-wheelers have emerged as a pivotal segment in the global EV revolution, especially in densely populated and urbanized regions where compact mobility solutions are in high demand. In the United States, while the adoption of four-wheeled electric vehicles has seen extensive research, the performance dynamics of electric two-wheelers remains underexplored. This research addresses this gap by developing regression-based state-space models to investigate key performance parameters. The study applies multiple regression models (linear, quadratic, cubic) to derive functional relationships between variables such as battery capacity, motor power, acceleration, range, and price. We aim to identify and quantify the interrelationships between key design and performance parameters, including battery capacity, motor power, acceleration, range, and base price. By employing regression-based state-space modeling with linear, quadratic, and cubic formulations, we extract functional patterns that shape the behavior and market positioning of these vehicles. Our data-centric methodology offers critical insights into how technical specifications influence affordability and adoption potential, particularly in the context of urban mobility. This work advances the broader discourse on electric vehicle innovation by spotlighting lightweight electric mobility tailored to American cityscapes. The findings have potential implications for manufacturers, policymakers, and urban planners seeking sustainable alternatives to car-centric infrastructure. As consumer interest in cost-effective and energy-efficient transport grows, understanding these relationships becomes essential for guiding future design and investment strategies.
| Published in | American Journal of Traffic and Transportation Engineering (Volume 10, Issue 6) |
| DOI | 10.11648/j.ajtte.20251006.11 |
| Page(s) | 135-149 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
Electric Vehicles, Regression Analysis, Battery Capacity, Motor Power, Acceleration, Range, Pricing, Polynomial Models
x | y | Model | Equation | R2 Score | RMS Error |
|---|---|---|---|---|---|
bcap | mpow | Linear | −2.095 + 5.284x1 | 0.96 | 7.04 |
bcap | mpow | Quadratic | −6.307 + 6.925x1 + −0.074x2 | 0.97 | 6.45 |
bcap | mpow | Cubic | −5.185 + 6.213x1 + 0.010x2 + −0.003x3 | 0.97 | 6.44 |
bcap | rk | Linear | 40.335 + 4.639x1 | 0.82 | 15.79 |
bcap | rk | Quadratic | 24.756 + 10.707x1 + −0.275x2 | 0.89 | 11.86 |
bcap | rk | Cubic | 35.076 + 4.167x1 + 0.498x2 + −0.023x3 | 0.91 | 11.27 |
mpow | acc | Linear | 9.408 + −0.069x1 | 0.69 | 1.79 |
mpow | acc | Quadratic | 10.299 + −0.153x1 + 0.001x2 | 0.78 | 1.51 |
mpow | acc | Cubic | 10.680 + −0.216x1 + 0.002x2 | 0.79 | 1.46 |
bcap | bp | Linear | 4396.546 + 1108.019x1 | 0.50 | 8037.82 |
bcap | bp | Quadratic | 2046.394 + 2023.379x1 + −41.483x2 | 0.52 | 7882.51 |
bcap | bp | Cubic | 5432.663 + −122.547x1 + 212.125x2 + −7.547x3 | 0.53 | 7788.89 |
mpow | bp | Linear | 4776.892 + 211.245x1 | 0.52 | 7837.25 |
mpow | bp | Quadratic | 4169.162 + 268.266x1 + −0.523x2 | 0.53 | 7809.92 |
mpow | bp | Cubic | 3632.502 + 356.874x1 + −2.426x2 + 0.010x3 | 0.53 | 7790.82 |
rk | bp | Linear | −2978.359 + 208.993x1 | 0.46 | 8311.28 |
rk | bp | Quadratic | −8654.166 + 363.732x1 + −0.847x2 | 0.48 | 8216.24 |
rk | bp | Cubic | −1973.575 + 106.817x1 + 1.941x2 + −0.009x3 | 0.48 | 8194.12 |
acc | bp | Linear | 29662.130 + −2489.493x1 | 0.50 | 8012.56 |
acc | bp | Quadratic | 40472.926 + −6108.051x1 + 242.248x2 | 0.55 | 7578.84 |
acc | bp | Cubic | 44667.312 + −8137.825x1 + 514.233x2 + −10.738x3 | 0.56 | 7567.74 |
EV | Electric Vehicle |
RMS | Root Mean Square |
R2 | Coefficient of Determination |
AI | Artificial Intelligence |
BCAP | Battery Capacity Mpow Motor Power |
RK | Range |
ACC | Acceleration |
BP | Base Price |
| [1] | Aziz, M., Oda, T., Mitani, T., Watanabe, Y., & Kashiwagi, T. (2015). Utilization of Electric Vehicles and Their Used Batteries for Peak-Load Shifting. Energies, 8(5), Article 3720-3738. |
| [2] | Garcia, I., & Miguel, L. J. (2012). Is the electric vehicle an attractive option for customers? Energies, 5(1), Article 71. |
| [3] | Huang, Y., Tang, Y., Yuan, W., Fang, G., Yang, Y., Zhang, X., Wu, Y., Yuan, Y., Wang, C., & Li, J. (2021). Challenges and recent progress in thermal management with heat pipes for lithium-ion power batteries in electric vehicles. Science China Technological Sciences, 64(5), Article 919. |
| [4] | Kim, S., Lee, J., & Lee, C. (2017). Does driving range of electric vehicles influence electric vehicle adoption? Sustainability, 9(10), Article 1783. |
| [5] | Lian, J., Liu, S., Li, L., Liu, X., Zhou, Y., Yang, F., & Yuan, L. (2017). A mixed logical dynamical-model predictive control (MLD-MPC) energy management control strategy for plug-in hybrid electric vehicles (PHEVs). Energies, 10(1), Article 74. |
| [6] | Lin, C.-K. (2022). Exploring the O2O (online to offline) marketing design of electric vehicles based on consumers’ emotions. SN Applied Sciences, 4(11), Article 2362. |
| [7] | Liu, R., Ding, Z., Jiang, X., Sun, J., Jiang, Y., & Qiang, W. (2020). How does experience impact the adoption willingness of battery electric vehicles? The role of psychological factors. Environmental Science and Pollution Research, 27(15), Article 18112. |
| [8] | Miceli, R., & Viola, F. (2017). Designing a sustainable university recharge area for electric vehicles: Technical and economic analysis. Energies, 10(10), Article 1604. |
| [9] | Millo, F., Rolando, L., & Fuso, R. (2014). Real world operation of a complex plug-in hybrid electric vehicle: Analysis of its CO2 emissions and operating costs. Energies, 7(7), Article 4554. |
| [10] |
Morfeldt, J., & Johansson, D. J. A. (2022). Impacts of shared mobility on vehicle lifetimes and on the carbon footprint of electric vehicles. Nature Communications, 13(1), Article 6400.
https://doi.org/10.1038/ s41467-022-33666-2 |
| [11] | Niessing, T., & Fang, X. (2025). Objective ride quality evaluation of a multi-link torsion axle for battery electric vehicles. Automotive and Engine Technology, 10(6), Article 6. |
| [12] | Reuss, H.-C., Freuer, A., & Grimm, M. (2014). Automatic cruise control for electric vehicles–statistical consumption and driver acceptance analysis in a representative test person study on public roads. In *14th International Stuttgart Symposium, 206, Article 110. |
| [13] | Saraswathi, R. J. V., Krishnakumar, V., Prabhu, V. V., Aruna, P., et al. (2025). Hybrid energy management strategy for ultra-capacitor/battery electric vehicles considering battery degradation. Electrical Engineering, 105(2), Article 25. |
| [14] |
Yang, J., Luo, D., Yang, S., & Hu, S. (2014). Charging load forecasting for electric vehicles based on fuzzy inference. In Communications in Computer and Information Science, 484, Article 62.
https://doi.org/10.1007/ 978-3-662-45643-962 |
| [15] | Zhang, X., Rao, R., Xie, J., & Liang, Y. (2014). The current dilemma and future path of China’s electric vehicles. Sustainability, 6(3), Article 1567. |
APA Style
Khushalani, B., Kollepara, R., Katari, P., Bavisetti, P., Balusu, D., et al. (2025). State-space Modeling and Data Analysis of Electric Two-wheeler Performance Metrics in the American Market. American Journal of Traffic and Transportation Engineering, 10(6), 135-149. https://doi.org/10.11648/j.ajtte.20251006.11
ACS Style
Khushalani, B.; Kollepara, R.; Katari, P.; Bavisetti, P.; Balusu, D., et al. State-space Modeling and Data Analysis of Electric Two-wheeler Performance Metrics in the American Market. Am. J. Traffic Transp. Eng. 2025, 10(6), 135-149. doi: 10.11648/j.ajtte.20251006.11
AMA Style
Khushalani B, Kollepara R, Katari P, Bavisetti P, Balusu D, et al. State-space Modeling and Data Analysis of Electric Two-wheeler Performance Metrics in the American Market. Am J Traffic Transp Eng. 2025;10(6):135-149. doi: 10.11648/j.ajtte.20251006.11
@article{10.11648/j.ajtte.20251006.11,
author = {Bharat Khushalani and Reena Kollepara and Pallavi Katari and Priya Bavisetti and Deepanshu Balusu and Harshini Natakula},
title = {State-space Modeling and Data Analysis of Electric Two-wheeler Performance Metrics in the American Market},
journal = {American Journal of Traffic and Transportation Engineering},
volume = {10},
number = {6},
pages = {135-149},
doi = {10.11648/j.ajtte.20251006.11},
url = {https://doi.org/10.11648/j.ajtte.20251006.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajtte.20251006.11},
abstract = {Electric two-wheelers have emerged as a pivotal segment in the global EV revolution, especially in densely populated and urbanized regions where compact mobility solutions are in high demand. In the United States, while the adoption of four-wheeled electric vehicles has seen extensive research, the performance dynamics of electric two-wheelers remains underexplored. This research addresses this gap by developing regression-based state-space models to investigate key performance parameters. The study applies multiple regression models (linear, quadratic, cubic) to derive functional relationships between variables such as battery capacity, motor power, acceleration, range, and price. We aim to identify and quantify the interrelationships between key design and performance parameters, including battery capacity, motor power, acceleration, range, and base price. By employing regression-based state-space modeling with linear, quadratic, and cubic formulations, we extract functional patterns that shape the behavior and market positioning of these vehicles. Our data-centric methodology offers critical insights into how technical specifications influence affordability and adoption potential, particularly in the context of urban mobility. This work advances the broader discourse on electric vehicle innovation by spotlighting lightweight electric mobility tailored to American cityscapes. The findings have potential implications for manufacturers, policymakers, and urban planners seeking sustainable alternatives to car-centric infrastructure. As consumer interest in cost-effective and energy-efficient transport grows, understanding these relationships becomes essential for guiding future design and investment strategies.},
year = {2025}
}
TY - JOUR T1 - State-space Modeling and Data Analysis of Electric Two-wheeler Performance Metrics in the American Market AU - Bharat Khushalani AU - Reena Kollepara AU - Pallavi Katari AU - Priya Bavisetti AU - Deepanshu Balusu AU - Harshini Natakula Y1 - 2025/12/09 PY - 2025 N1 - https://doi.org/10.11648/j.ajtte.20251006.11 DO - 10.11648/j.ajtte.20251006.11 T2 - American Journal of Traffic and Transportation Engineering JF - American Journal of Traffic and Transportation Engineering JO - American Journal of Traffic and Transportation Engineering SP - 135 EP - 149 PB - Science Publishing Group SN - 2578-8604 UR - https://doi.org/10.11648/j.ajtte.20251006.11 AB - Electric two-wheelers have emerged as a pivotal segment in the global EV revolution, especially in densely populated and urbanized regions where compact mobility solutions are in high demand. In the United States, while the adoption of four-wheeled electric vehicles has seen extensive research, the performance dynamics of electric two-wheelers remains underexplored. This research addresses this gap by developing regression-based state-space models to investigate key performance parameters. The study applies multiple regression models (linear, quadratic, cubic) to derive functional relationships between variables such as battery capacity, motor power, acceleration, range, and price. We aim to identify and quantify the interrelationships between key design and performance parameters, including battery capacity, motor power, acceleration, range, and base price. By employing regression-based state-space modeling with linear, quadratic, and cubic formulations, we extract functional patterns that shape the behavior and market positioning of these vehicles. Our data-centric methodology offers critical insights into how technical specifications influence affordability and adoption potential, particularly in the context of urban mobility. This work advances the broader discourse on electric vehicle innovation by spotlighting lightweight electric mobility tailored to American cityscapes. The findings have potential implications for manufacturers, policymakers, and urban planners seeking sustainable alternatives to car-centric infrastructure. As consumer interest in cost-effective and energy-efficient transport grows, understanding these relationships becomes essential for guiding future design and investment strategies. VL - 10 IS - 6 ER -
Department of Artificial Intelligence, Shri Vishnu Engineering College for Women, Andhra Pradesh, India
Department of Artificial Intelligence, Shri Vishnu Engineering College for Women, Andhra Pradesh, India
Department of Artificial Intelligence, Shri Vishnu Engineering College for Women, Andhra Pradesh, India
Department of Artificial Intelligence, Shri Vishnu Engineering College for Women, Andhra Pradesh, India
Department of Artificial Intelligence, Shri Vishnu Engineering College for Women, Andhra Pradesh, India
Department of Artificial Intelligence, Shri Vishnu Engineering College for Women, Andhra Pradesh, India
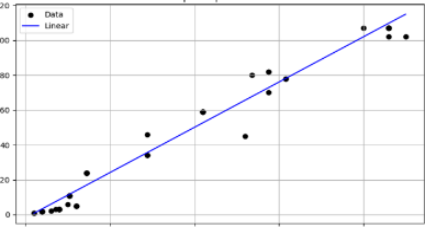
Figure 1. bcap vs. mpow-Linear.
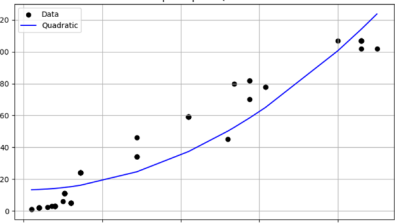
Figure 2. bcap vs. mpow-Quadratic.
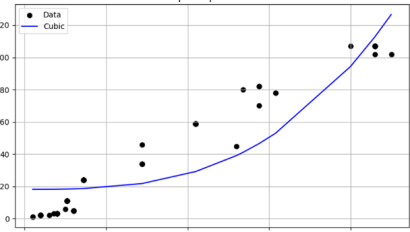
Figure 3. bcap vs. mpow-Cubic.
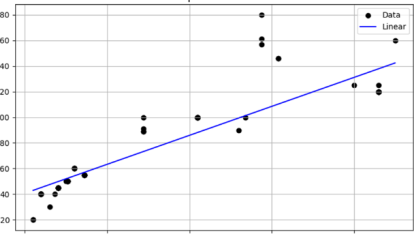
Figure 4. bcap vs. rk-Linear.
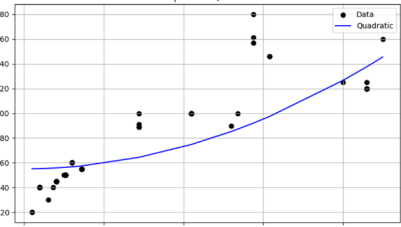
Figure 5. bcap vs. rk-Quadratic.
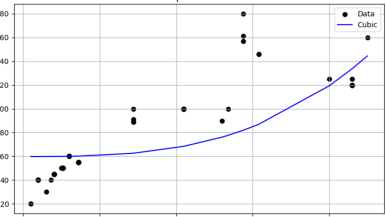
Figure 6. bcap vs. rk-Cubic.
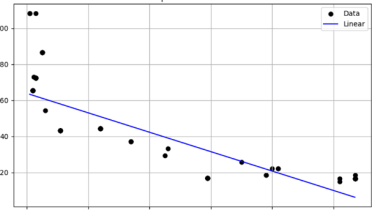
Figure 7. mpow vs. acc-Linear.
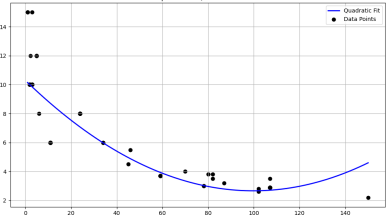
Figure 8. mpow vs. acc-Quadratic.
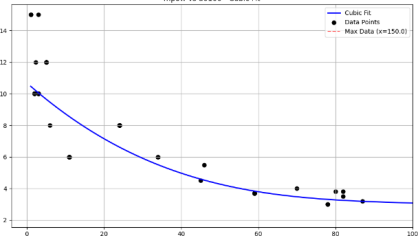
Figure 9. mpow vs. acc-Cubic.
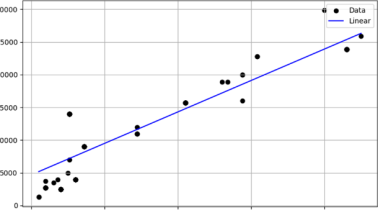
Figure 10. bcap vs. bp-Linear.
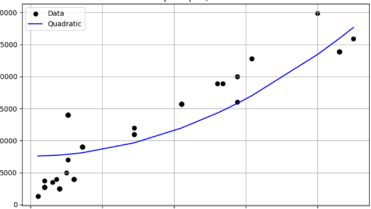
Figure 11. bcap vs. bp-Quadratic.
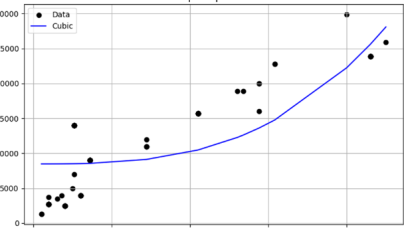
Figure 12. bcap vs. bp-Cubic.
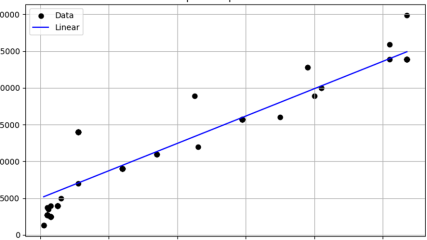
Figure 13. mpow vs. bp-linear.
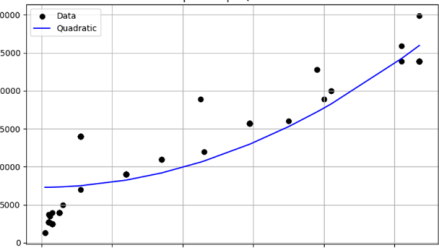
Figure 14. mpow vs. bp-Quadratic.
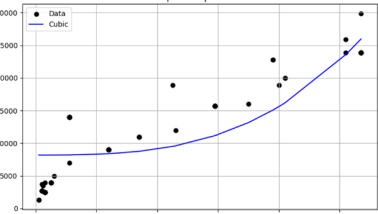
Figure 15. mpow vs. bp-Cubic.
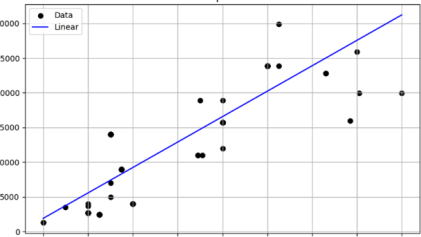
Figure 16. rk vs. bp-Linear.
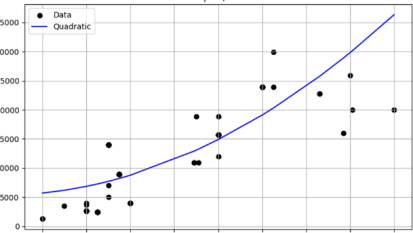
Figure 17. rk vs. bp-Quadratic.
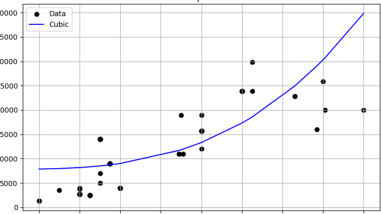
Figure 18. rk vs. bp-Cubic.
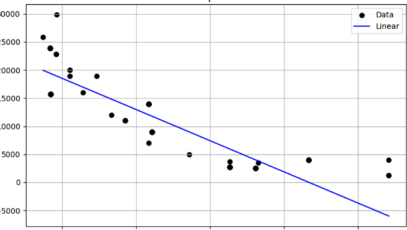
Figure 19. acc vs. bp-Linear.
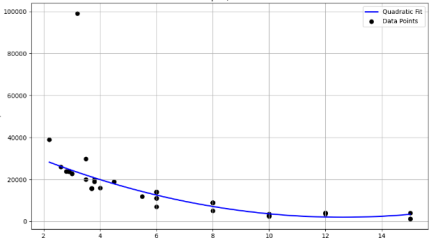
Figure 20. acc vs. bp-Quadratic.
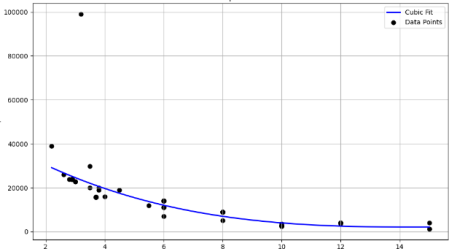
Figure 21. Acc vs. bp-Cubic.
Information

